前言
学习网站:Starrycoding
有关图的基本概念:oi wiki
图的存储
在题目中,想要对图进行操作,就需要将图存储下来。
常见的图的存储方式有:
邻接矩阵
邻接矩阵是一种用二维数组来表示图的方式。
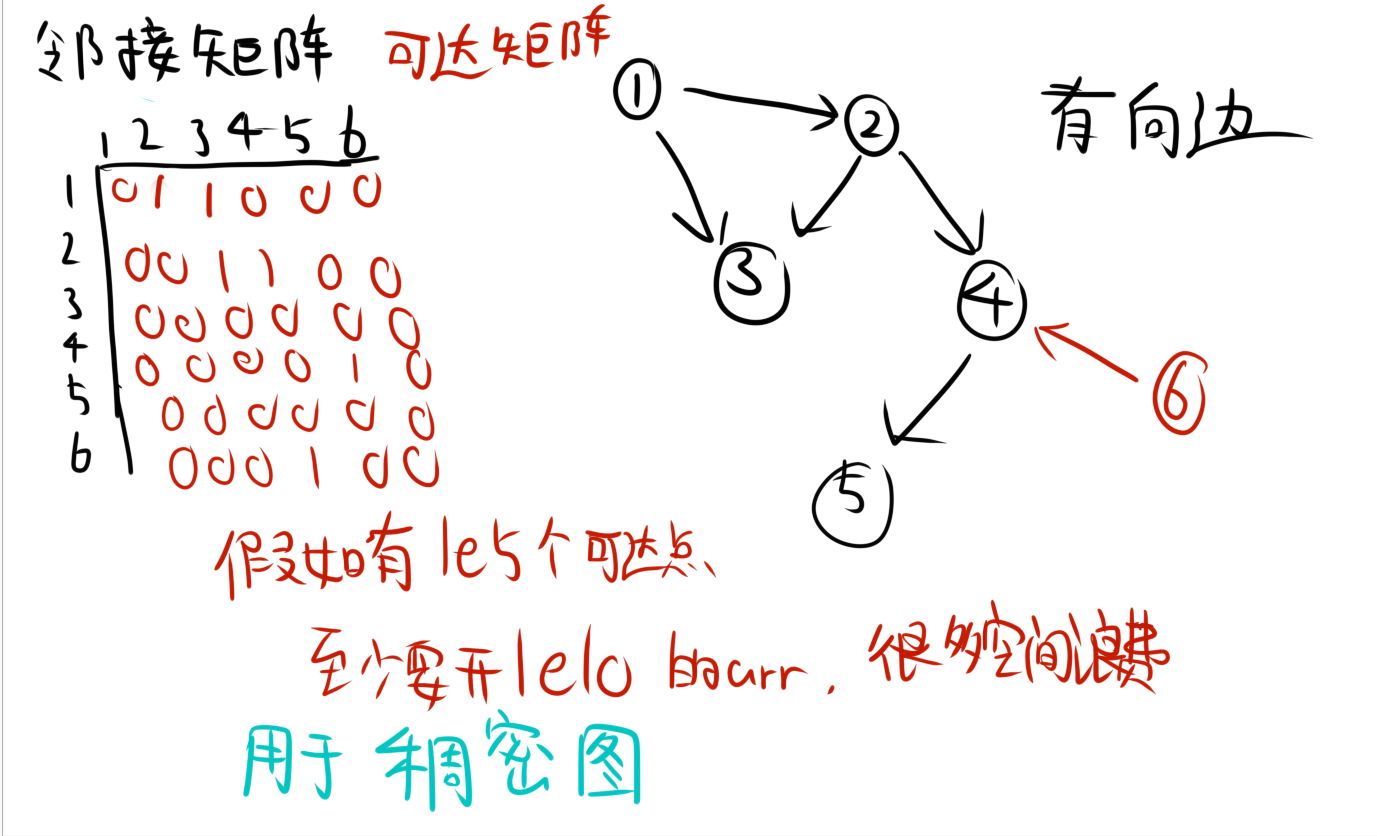
使用一个二维数组$a$来表示图,其中$a[i][j]$值为1表示存在从点$i$到点$j$的边,值为0表示不存在。如果是带有权值的图,那么$a[i][j]$值为权值。
邻接表
邻接表的实现方式有两种,一种是链式前向星,另一种通过vector数组。
我们这里介绍用vector数组实现的,这种方法也更方便排序。
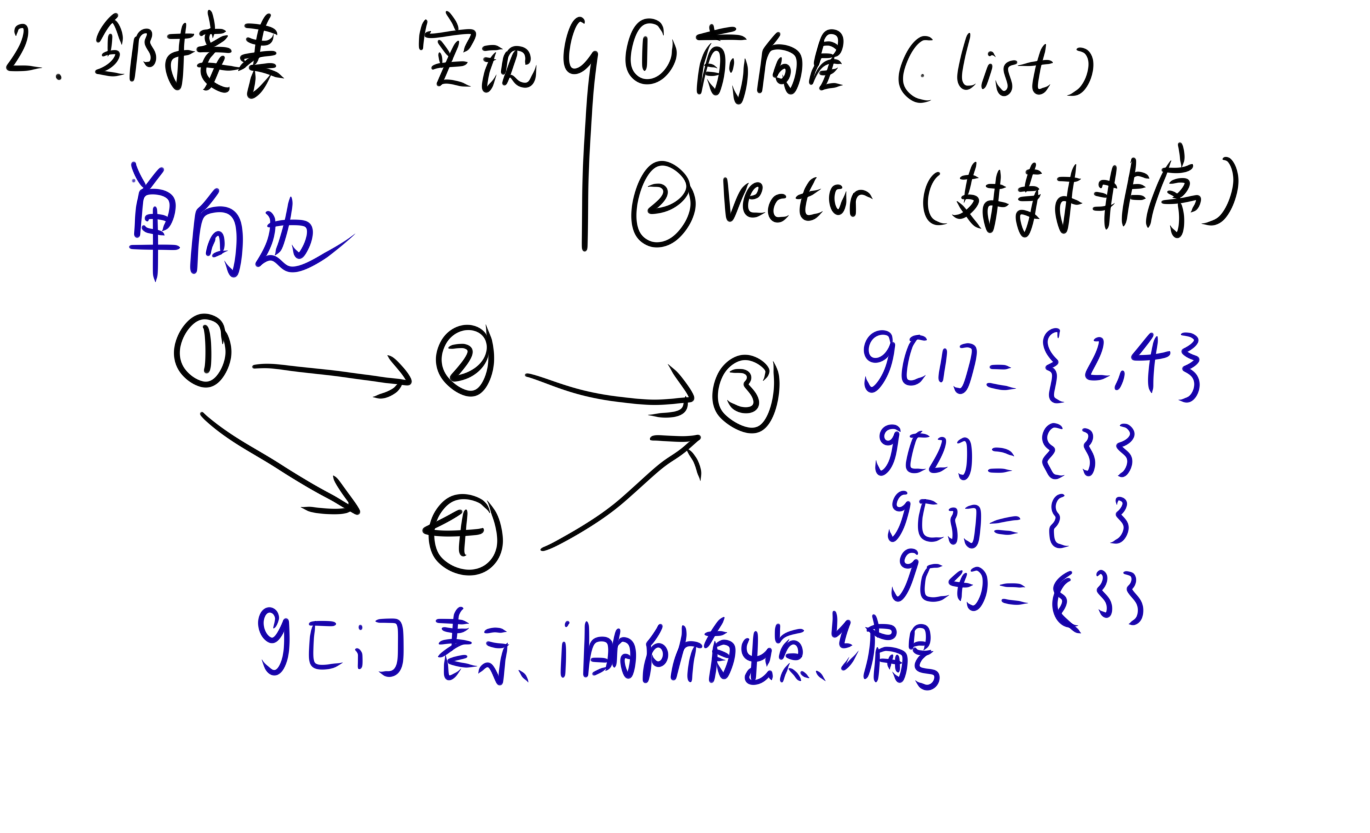
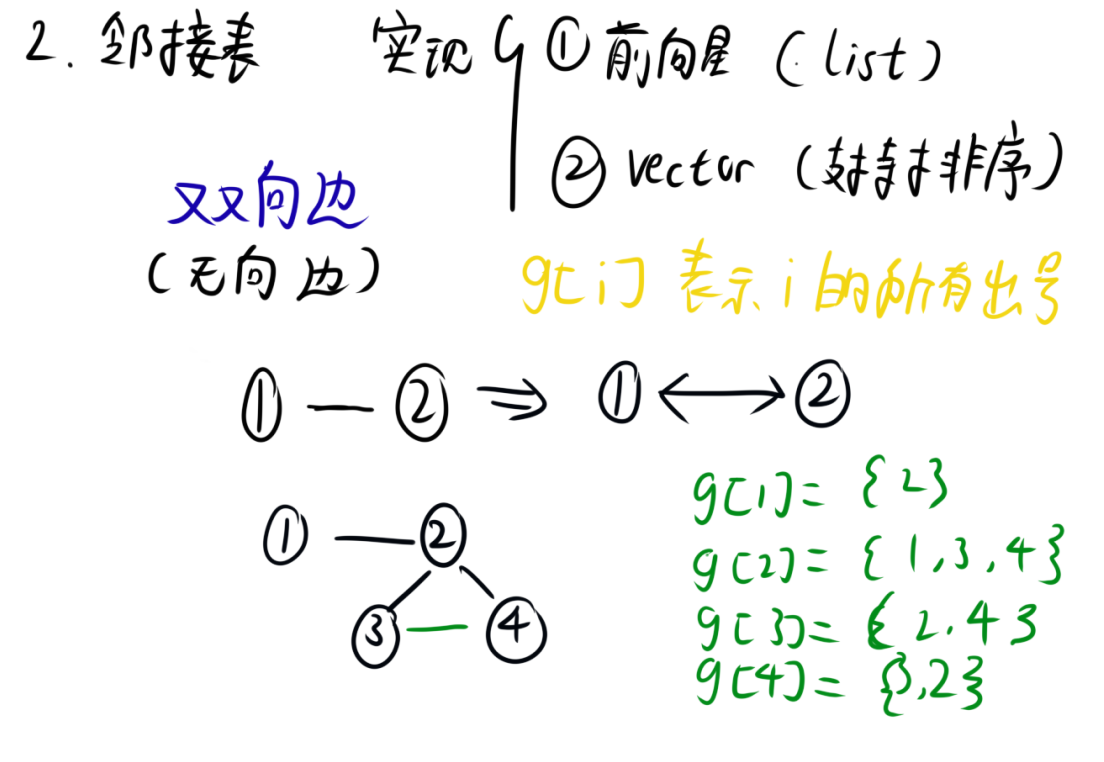
使用一个vector数组$a$来表示图,其中$a[i]$表示从点$i$出发的所有边。显而易见这是个二维数组。
1
|
vector<vector<int>> g(N, vector<int>()); // graph
|
假设我们要添加一条从点$u$到点$v$的边,那么我们可以这样:
假如还有一条从点$u$到点$w$的边,就再push_back一次即可.
例题
P42 树的遍历
分析:
存储树,我们可以用一个数组来存储每个点的父节点。
然后再用邻接表来存储树。只需要把父节点作为起点,子节点作为终点,添加一条边即可。最后就可以对树进行遍历了。注意此处要从小到大输出,所以我们可以对邻接表进行排序
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
|
#include <bits/stdc++.h>
using namespace std;
const int N = 60;
int fa[N];
vector<vector<int>> g(N, vector<int>()); // graph
void dfs(int x)
{
cout << x << " ";
for (auto &y : g[x])
{
dfs(y);
}
}
void bfs(int x)
{
queue<int> q;
q.push(x);
while (q.size())
{
int x = q.front();
q.pop();
cout << x << " ";
for (auto &y : g[x])
q.push(y);
}
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
int n;
cin >> n;
for (int i = 2; i <= n; i++)
{
cin >> fa[i];
}
for (int i = 2; i <= n; i++)
{
g[fa[i]].push_back(i);
}
for (int i = 1; i <= n; i++)
{
sort(g[i].begin(), g[i].end());
}
dfs(1);
cout << "\n";
bfs(1);
return 0;
}
|
P64 图的遍历
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
|
#include <bits/stdc++.h>
using namespace std;
const int N = 1e5 + 9;
bitset<N> vis;
vector<vector<int>> g(N, vector<int>());
void dfs(int x)
{
vis[x] = true;
for (auto &y : g[x])
{
if (vis[y])
continue;
dfs(y);
}
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
int n, m;
cin >> n >> m;
for (int i = 1; i <= m; i++)
{
int a, b;
cin >> a >> b;
g[a].push_back(b);
}
dfs(1);
for (int i = 1; i <= n; i++)
{
if (vis[i])
cout << i << " ";
}
cout << "\n";
return 0;
}
|
并查集
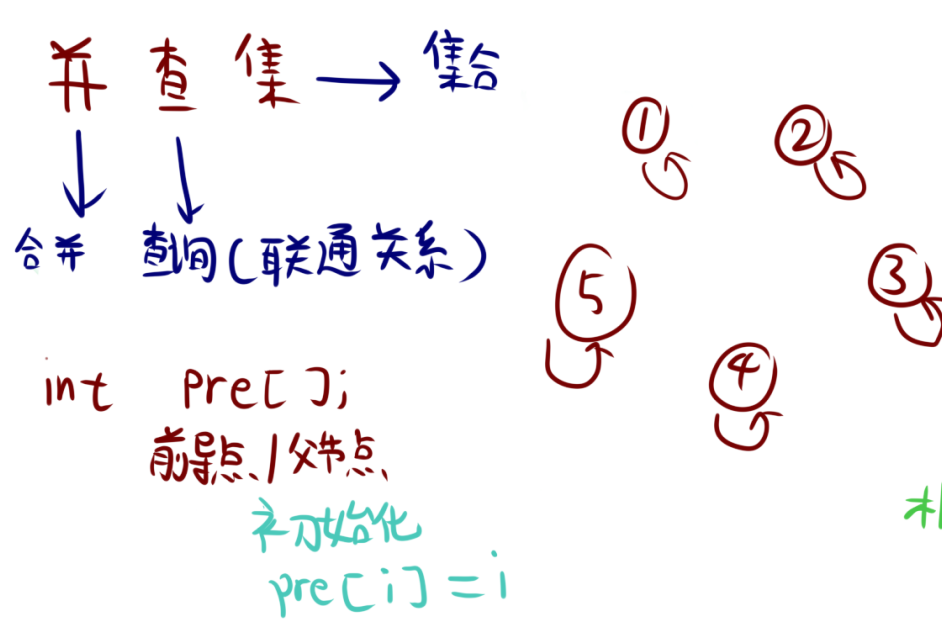
并查集,并指合并,查指查询(联通关系),集指集合。
并查集可以用来做联通块的问题。并查集的所有操作都是对根节点进行的。
并查集的具体操作有:
- 初始化:一个数组$pre$, 假设有点$u$和$v$,在一开始我们初始化认为这两个点是自环的,即$pre[u] = u, pre[v] = v$.因此初始化为$pre[i] = i$
- root函数:通过这个函数找到一个点的根节点。最重要的函数.
- 合并:将两个点联通,实际就是将两个点的根节点合并。即$pre[root(u)] = root(v)$
- 查询:查询两个点是否联通,即$root(u) == root(v)$
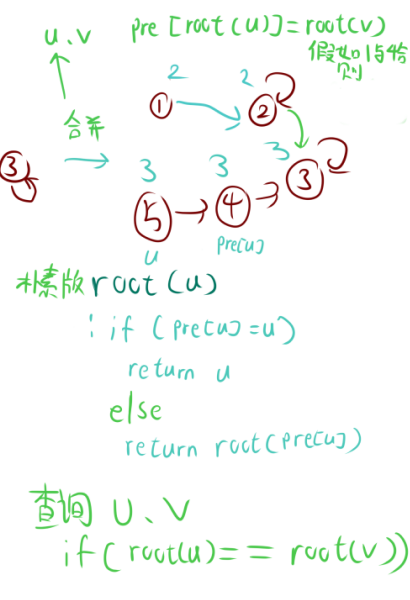
朴素版root函数:
1
2
3
4
5
6
7
|
int root(int x)
{
if (pre[x] == x)
return x;
else
return root(pre[x]); // 递归找到根节点
}
|
朴素版的时间复杂度为$O(n)$,但是我们往往会查询很多点的root,这样的时间复杂度就会很高。因此我们需要优化root函数。
路径压缩版root函数:
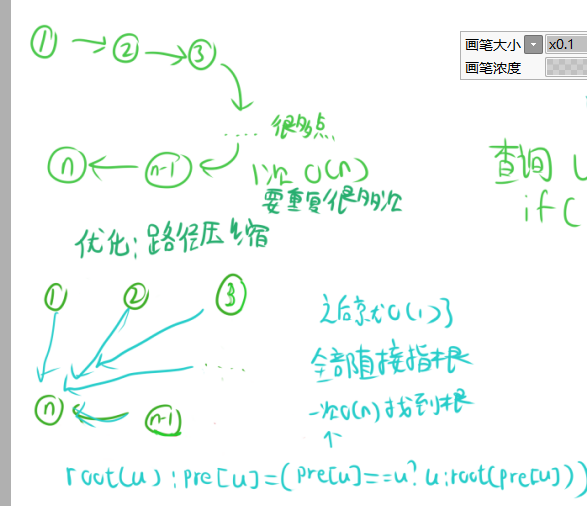
我们在一次找到根节点后,其实就能将整条路径上的所有点的根节点都更新为根节点。这样就可以大大减少时间复杂度。我们只需要进行极少次的$O(n)$操作,后续都能是$O(1)$的。均摊下来时间复杂度就很小了。
1
2
3
4
5
6
7
8
9
10
11
12
13
|
int root(int x) // 路径压缩实现寻找根节点,并将沿途的节点都指向根节点
{
if (pre[x] == x)
{
return x;
}
else
{
int root_x = root(pre[x]);
pre[x] = root_x;
return root_x;
}
}
|
例题
P68 联通块问题
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
|
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
const int N = 2e5 + 9;
int pre[N], cnt[N];
int root(int x) // 路径压缩实现寻找根节点,并将沿途的节点都指向根节点
{
if (pre[x] == x)
{
return x;
}
else
{
int root_x = root(pre[x]);
pre[x] = root_x;
return root_x;
}
}
void merge(int x, int y) // 这里x和y的顺序是无所谓的,都正确
{
pre[root(x)] = root(y);
}
bool isCon(int x, int y) // 判断x和y是否连通
{
return root(x) == root(y);
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
int n, m;
cin >> n >> m;
for (int i = 1; i <= n; i++)
{
pre[i] = i;
}
for (int i = 1; i <= m; i++)
{
int u, v;
cin >> u >> v;
merge(u, v);
}
for (int i = 1; i <= n; i++) // 使用一个桶来统计每个连通块的大小
{
cnt[root(i)]++;
}
vector<int> v; // 用vector方便排序
for (int i = 1; i <= n; i++)
{
if (cnt[i])
{
v.push_back(cnt[i]);
}
}
sort(v.begin(), v.end());
for (auto &y : v)
{
cout << y << " ";
}
cout << "\n";
return 0;
}
|
最短路
普通的无权图的最短路问题,一般用BFS来解决。
但是当我们遇到有权图的最短路问题时,就需要使用最短路算法来解决。
常见的最短路算法有:
- Dijkstra(处理单源最短路)
- Floyd(处理多源最短路)
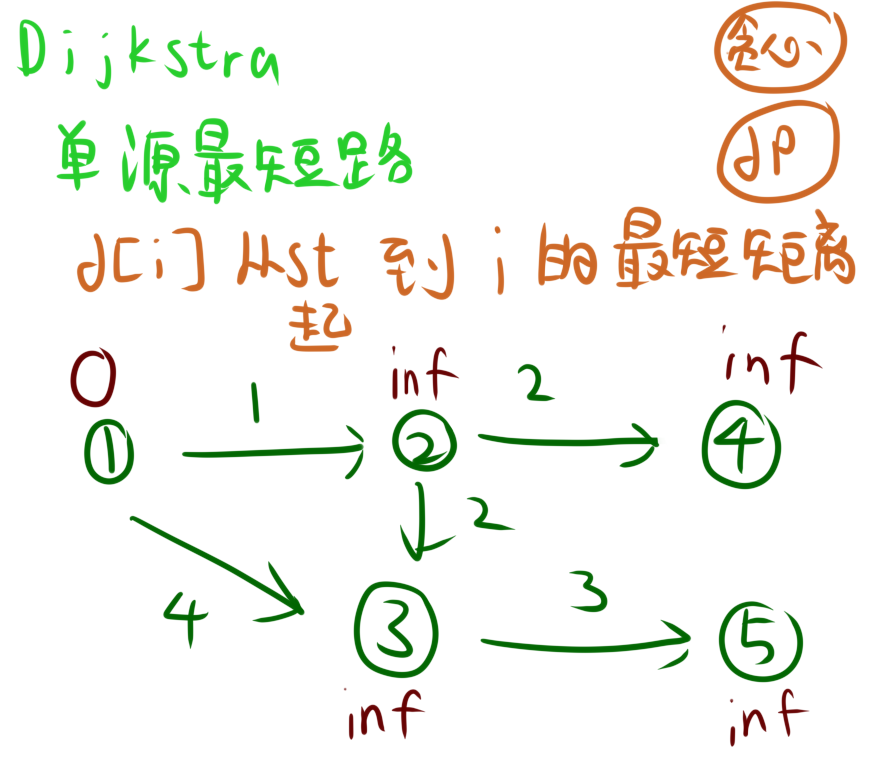
Dijkstra
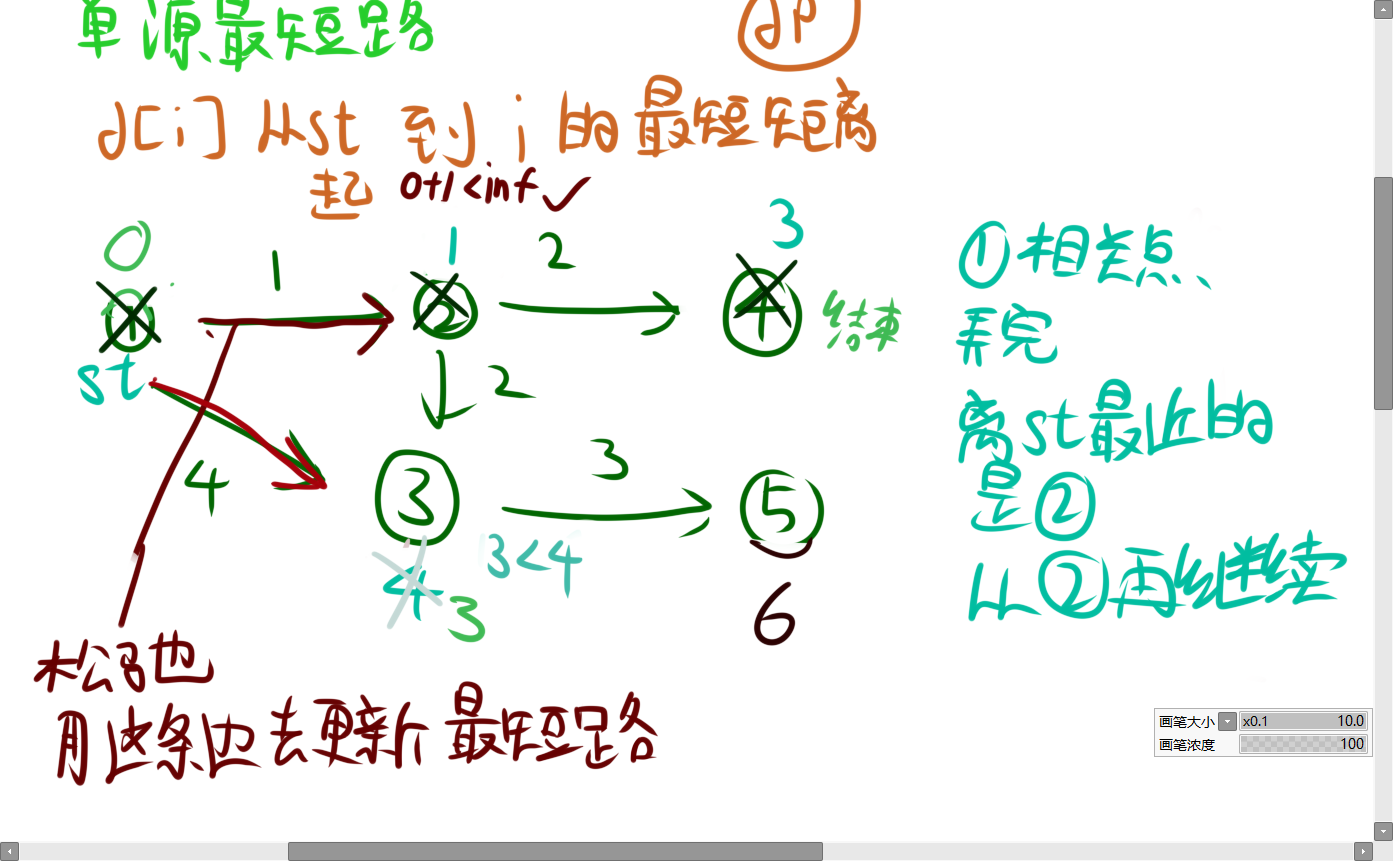
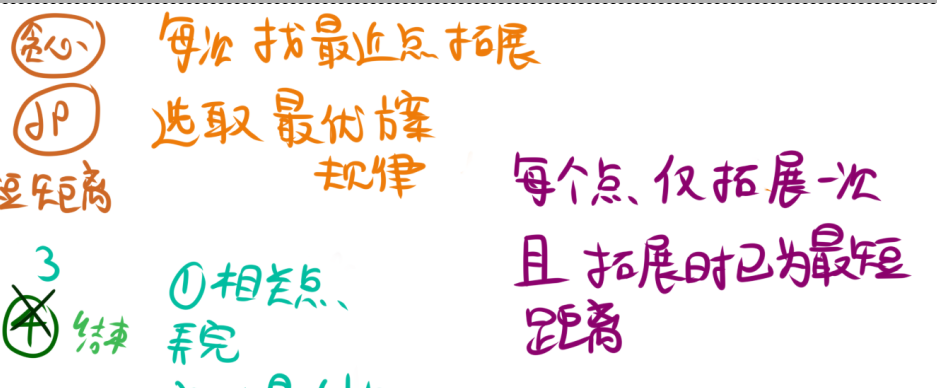
Dijkstra算法是一种贪心算法,它的思想是:每次都选择当前距离起点最近的点,然后更新它的邻居的距离。
Dijkstra算法的步骤:
-
初始化一个数组$dis$,$dis[i]$表示从起点到点$i$的最短距离。初始化$dis[起点] = 0$,其他点的距离都为$inf$.
-
初始化一个数组$vis$,$vis[i]$表示点$i$是否已经找到最短路径。如果已经找到了最短路径,那么$vis[i] = true$,这个点不需要再更新了。开始时就是$vis[起点] = true$
-
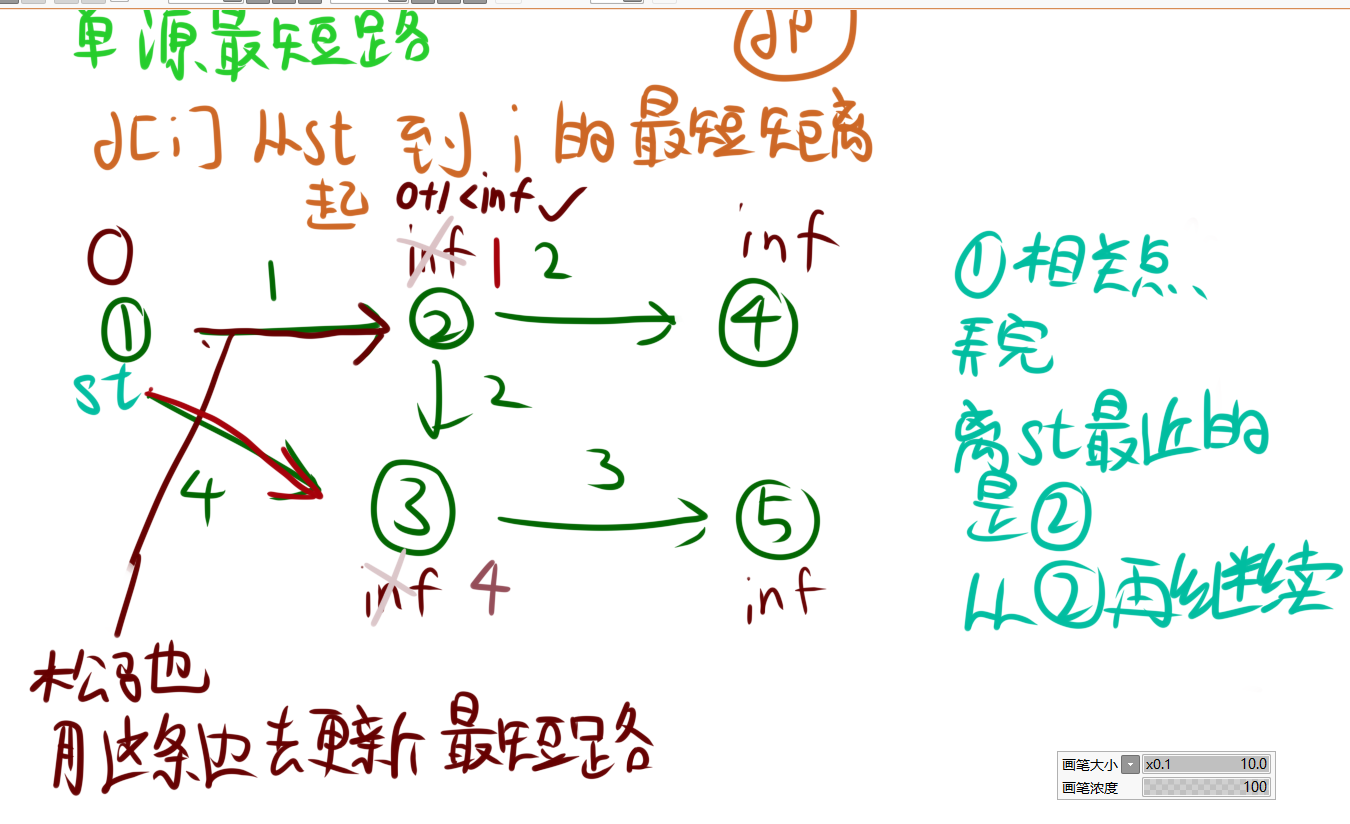
松弛操作:我们从起点开始,每次选择当前距离起点最近的点,然后更新它的邻居的距离。即$dis[邻居] = min(dis[邻居], dis[当前点] + 边权)$.
-
如图我们更新完二号和三号点后,一号的邻居点都已经更新完毕,接下来我们就要在这些邻居点中找到$d[i]$最小的点,这个点就是下一个起点,根据性质,这个点的$d[i]$一定是最小的。那么这个点的$vis[i]$就可以置为$true$了。如图,我们选择二号点作为起点继续更新。
-
重复上述操作,直到所有点都找到最短路径。
例题1
P69 【模板】最短路(1)
这一题就是Dijkstra算法的模板题。但是是朴素版,时间复杂度是$O(n^2)$。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
|
#include <bits/stdc++.h>
using namespace std;
const int N = 1e3 + 9;
typedef long long ll;
struct node
{
int x, w; // x表示出点,w表示权值
};
vector<vector<node>> g(N, vector<node>());
ll d[N], n, m;
void dijkstra(int st)
{
memset(d, 0x3f, sizeof(ll) * (n + 1));
d[st] = 0;
bitset<N> vis; // 记录已经被拓展过的
for (int i = 1; i <= n - 1; i++)
{
// 找出最小点(距离源点最近的点)
int u = 1;
for (int j = 1; j <= n; j++)
{
if (vis[u] || (!vis[j] && d[j] < d[u]))
{
u = j;
}
}
// 表示u已被拓展
vis[u] = true;
// 此时d[u]已为最优的,别的不一定
for (const auto &edge : g[u])
{
int v = edge.x;
int w = edge.w;
if (!vis[v] && d[v] > d[u] + w)
{
d[v] = d[u] + w;
}
}
}
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
cin >> n >> m;
for (int i = 1; i <= m; i++)
{
int u, v, w;
cin >> u >> v >> w;
if (u != v) // 避免自环
{
g[u].push_back({v, w});
}
}
dijkstra(1);
cout << (d[n] >= 0x3f3f3f3f ? -1 : d[n]) << "\n"; // 输出d[n],若d[n]未被更新,则输出-1(即d[n]>=0x3f3f3f3f)
return 0;
}
|
例题2
P70 【模板】最短路(2)
上一题虽然我们实现了,但是时间复杂度实在难以接受,我们可以考虑使用堆优化的Dijkstra算法。(使用优先队列)时间复杂度为$O(m\log m)$。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
|
for (int i = 1; i <= n - 1; i++)
{
// 找出最小点(距离源点最近的点)
int u = 1;
for (int j = 1; j <= n; j++)
{
if (vis[u] || (!vis[j] && d[j] < d[u]))
{
u = j;
}
}
// 表示u已被拓展
vis[u] = true;
// 此时d[u]已为最优的,别的不一定
for (const auto &edge : g[u])
{
int v = edge.x;
int w = edge.w;
if (!vis[v] && d[v] > d[u] + w)
{
d[v] = d[u] + w;
}
}
}
|
观察这个循环,我们可以发现,每次都要找到$d[i]$最小的点,这个过程是$O(n)$的。我们可以使用优先队列来优化这个过程。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
|
void dijkstra(int st)
{
memset(d, 0x3f, sizeof(ll) * (n + 1));
d[st] = 0;
bitset<N> vis; // 记录已经被拓展过的
priority_queue<node> pq; // 进入队列的点,按权值从小到大排序
pq.push({st, d[st]}); // 将源点加入优先队列
while (pq.size())
{
int u = pq.top().x;
pq.pop();
if (vis[u]) // 跳过冗余点
continue;
vis[u] = true; // 标记u已得到最短距离,不再更新
for (const auto &edge : g[u])
{
int v = edge.x;
int w = edge.w;
if (!vis[v] && d[v] > d[u] + w) // 如果vis[v]为true,则该点已得到最短路径,无需更新
{
d[v] = d[u] + w;
pq.push({v, d[v]});
}
}
}
}
|
还要注意的是,我们使用优先队列时,需要重载小于(<)号。
1
2
3
4
5
6
7
8
9
|
struct node
{
ll x, w; // x表示出点,w表示权值
bool operator<(const node &v) const
{
return w == v.w ? (x < v.x) : (w > v.w); // 重载<运算符,(优先比较权值)w从小到大排序,若权值相等,则按x排序
// 注意优先队列的比较器是相反的,要小根堆,就得是w>v.w,和sort函数之类的比较器写法相反
}
};
|
可以看出,使用优先队列优化的Dijkstra算法和bfs是有点像的。
Floyd
Floyd算法是一种多源最短路算法,它的思想是:枚举中间点,然后更新所有点之间的距离。
由于Floyd的高复杂度$O(n^3)$,所以数据范围一定会在$300$左右。
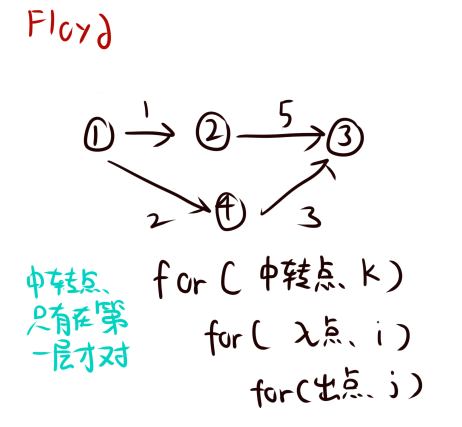
Floyd的模板就是一个三重循环。
1
2
3
4
5
6
7
8
9
10
|
for (int k = 1; k <= n; k++) //注意这个中间点必须放在第一层循环
{
for (int i = 1; i <= n; i++)
{
for (int j = 1; j <= n; j++)
{
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
}
}
|
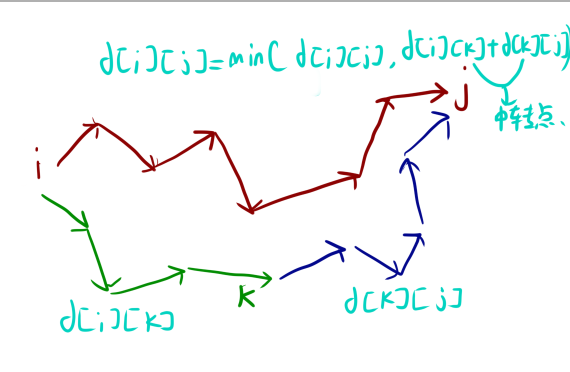
Floyd是一个很宏观的算法,它不会理会具体的路径,只是枚举所有的路径。然后找出最短的路径。
例题
P71 【模板】最短路(3)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
|
#include <bits/stdc++.h>
using namespace std;
const int N = 350;
typedef long long ll;
const ll inf = 0x3f3f3f3f;
ll d[N][N], n, m, q;
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
cin >> n >> m >> q;
memset(d, 0x3f, sizeof(d));
for (int i = 1; i <= m; i++)
{
ll u, v, w;
cin >> u >> v >> w;
d[u][v] = min(d[u][v], w); // 存储最小的边权
}
// 初始化
for (int i = 1; i <= n; i++)
{
d[i][i] = 0; // 自环为0
}
for (int k = 1; k <= n; k++)
{
for (int i = 1; i <= n; i++)
{
for (int j = 1; j <= n; j++)
{
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
}
}
while (q--)
{
int u, v;
cin >> u >> v;
cout << (d[u][v] >= inf ? -1 : d[u][v]);
}
return 0;
}
|
